Demos
Click thumbnails below to view different scenes.
RGB
Valid Mask
Pointcloud Depth
Mesh Depth
Loading 3D model...




Click thumbnails below to view different scenes.
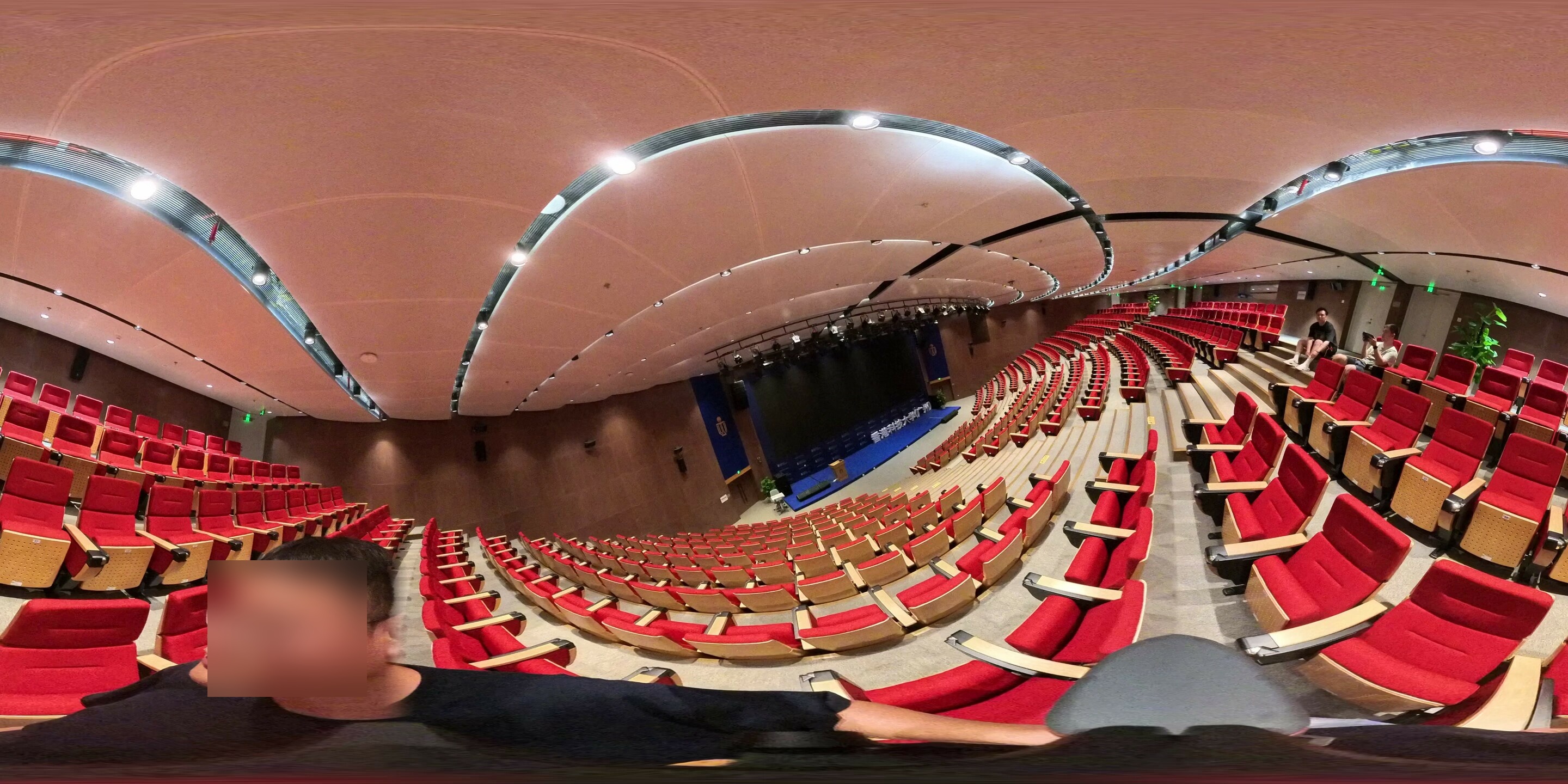
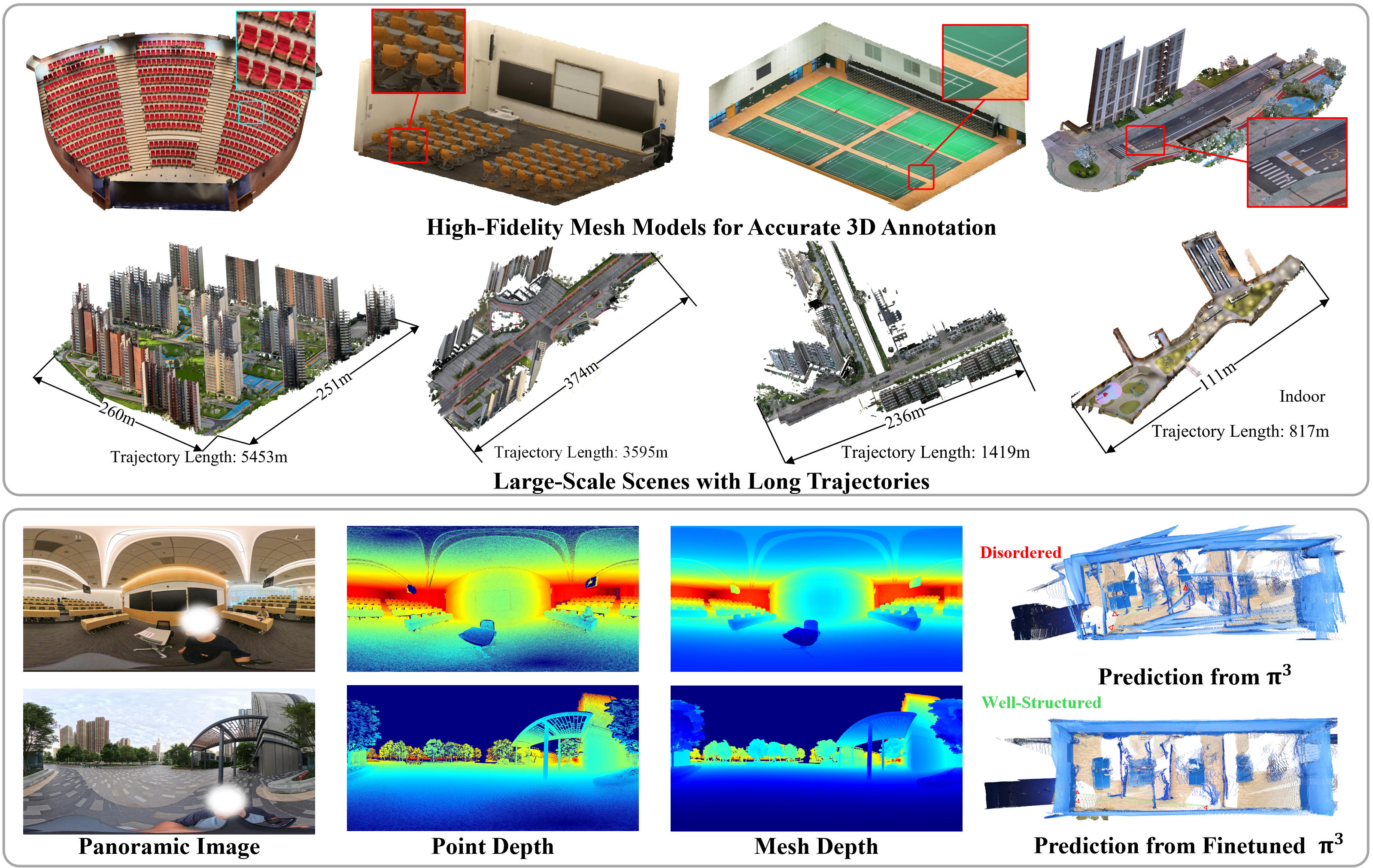
Holo360D is a large-scale real-world panoramic 3D dataset with continuous camera trajectories and accurately aligned high-completeness depth maps. The raw data are collected using a 3D laser scanner coupled with a 360-degree camera, then processed with online/offline SLAM and a panorama-specific post-processing pipeline.
Panoramas
Meshes, point clouds, depth maps, and camera poses
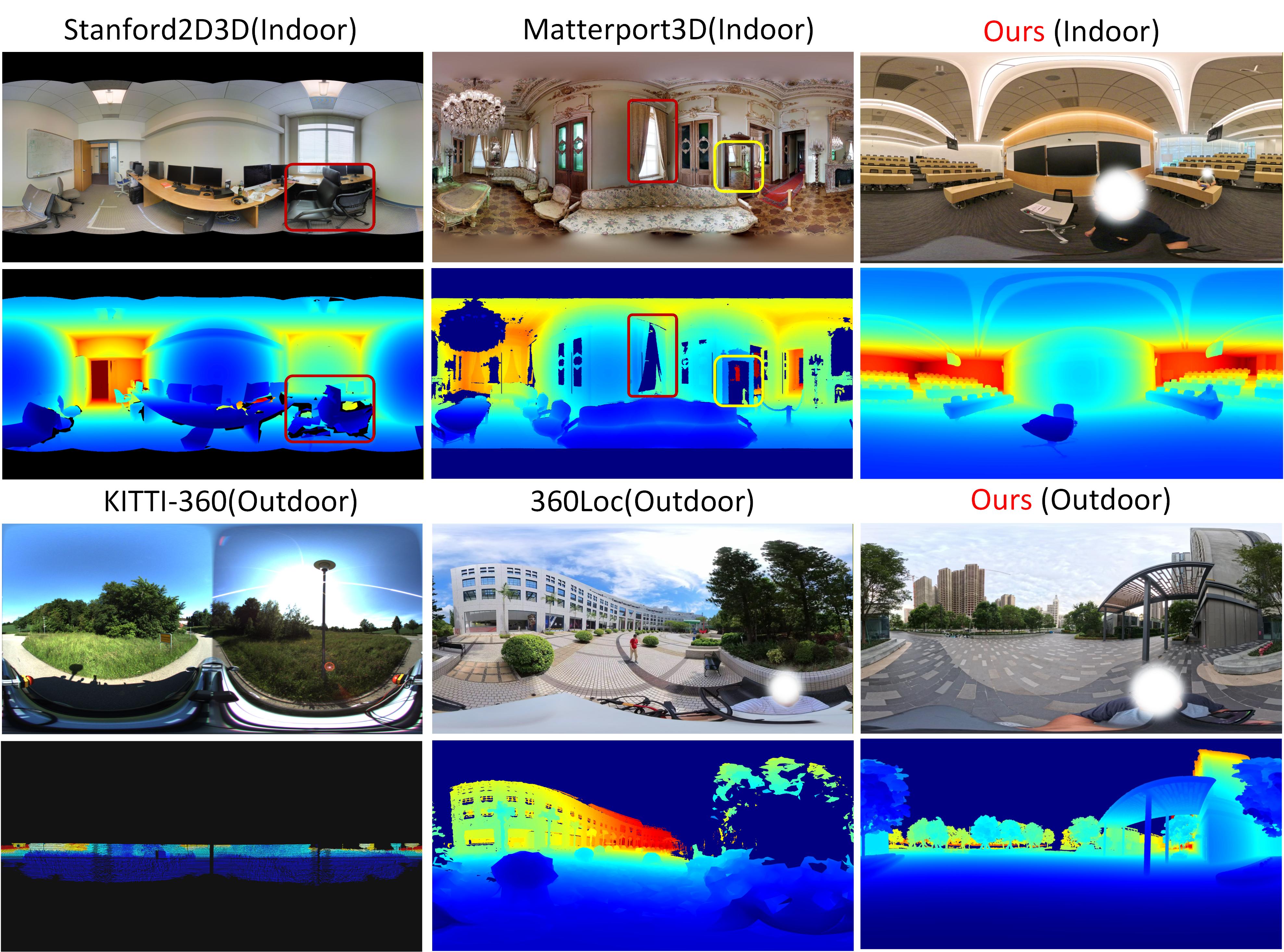
Holo360D is the only large-scale real-world panoramic dataset that provides accurately aligned high-completeness depth maps and continuous camera trajectories.
| Datasets | Indoor | Outdoor | Continuity | Alignment↓ | Depth Completion↑ | Scenes | Numbers |
|---|---|---|---|---|---|---|---|
| Stanford2D3D | ✓ | × | × | 9.45 | 0.72(I) | 10 | 1,314 |
| Matterport3D | ✓ | × | × | 7.99 | 0.62(I) | 90 | 10,790 |
| Depth360 | × | ✓ | ✓ (N/A) | N/A | N/A | 30 | 30,000 |
| 360Loc | ✓ | ✓ | ✓ (0.49) | 12.24 | 0.62(I), 0.7(O) | 4 | 2,244 |
| KITTI-360 | × | ✓ | ✓ (1.01) | 11.72 | 0.16(O) | 11 | 83,000 |
| Holo360D (Ours) | ✓ | ✓ | ✓ (0.29) | 5.03 | 0.86(I), 0.82(O) | 75 | 109,495 |
@article{ou2026holo360d,
title={Holo360D: A Large-Scale Real-World Dataset with Continuous Trajectories for Advancing Panoramic 3D Reconstruction and Beyond},
author={Ou, Jing and Cao, Zidong and Ren, Yinrui and Li, Zhuoxiao and Zhu, Jinjing and Hua, Tongyan and Zhang, Shuai and Xiong, Hui and Zhao, Wufan},
journal={arXiv preprint arXiv:2604.22482},
year={2026}
}